6 实战技巧
6.1 代码规范
- 变量命名带前缀以识别变量格式,例如
rTarPos:REAL;,biEmergencyStop:BOOL;等,可参阅 CoDeSys Identifiers 。 - 较多或多设备共用的变量归纳为结构体。例如
hb: ST_HANDBOX,cy: ST_CYLINDER等。 - 尽量使用标准的语法,例如
IF..THEN..ELSIF..END_IF,CASE..OF..END_CASE等。避免使用ExST,不方便移植。 - 需要映射到IO的变量直接在对应IO设备内关联,尽量不使用
AT %IX0.0的直接地址引用。批量数据除外。 - 重复变量、功能块和结构体使用
arTest: ARRAY[0..2] of ST_TEST之类的一维到三维数组,通常不建议超过二维。 - 大多数程序中都使用CASE进行分步,并做好注释。尽量避免WHILE循环。FOR循环中也需要检测最大值。
- 善用交叉引用和全局搜索功能。这方面还是TIA好,除了交叉引用还可以用#REGION带注释定位。而CODESYS的region pragma还不如缩进。
- 创建文件夹归纳Visu、POU、Struct和GVL等。
- 较长的判断逻辑可以分行,并在每一行做好注释。变量名不宜过长,变量深度一般不超过3层。
6.2 CASE分步
CASE是ST的基础语法,很多老师傅从梯形图转到ST编程后不会灵活运用CASE分步,这里单独拎出来做一小节。在实际应用中,十个程序有八个都会用CASE分步以清晰流程。例如,一个传送带设备,主体结构如下:传送带运行 -> 传感器1检测到物体,传送带停止 -> 气缸1动作,500MS后松开 -> 等待传感器2 -> 传送带运行。
CASE iState OF
0:
Out.Trans:=TRUE;//传送带运行
IF In.Sensor1 THEN//检测到Sensor1,跳转到第10步
Out.Trans:=FALSE;
iState:=10;
END_IF
10:
Out.Cylinder:=TRUE;//气缸打开
ton_Delay(IN:=TRUE,PT:=T#500MS);//计时器500MS
IF ton_Delay.Q THEN
ton_Delay(IN:=FALSE);//复位计时器
Out.Cylinder:=FALSE;//关闭气缸
iState:=20;//跳转到第20步
END_IF
20:
IF In.Sensor2 THEN//检测到Sensor2,跳转到0步
iState:=0;
END_IF
END_CASE
CASE分步时用的iState一般选INT,每个步骤间隔10以方便后期增减步骤,报警时做一个特殊步骤例如999。有些自动化流程中会有暂停再继续的需求,可在暂停时根据iState的值判断能否继续,对iState加1或减1操作一次让流程卡住,需要继续时恢复iState的值即可从中断步骤继续运行。
当使用Visu时,iState还可以用作当前步骤显示。添加一个TextList,将ID与iState关联并用作文本框的Dynamic text index即可。
6.3 基础的visu、softmotion项目
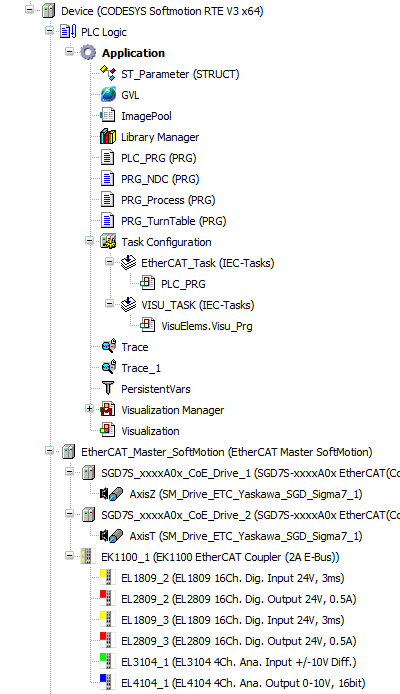
该项使用了两个安川伺服轴,用MC_MoveAbsolute做基础的运动控制。使用了ImagePool嵌入背景图片和LOGO,使用PersistentVars保存参数配置。
6.4 三轴龙门CNC
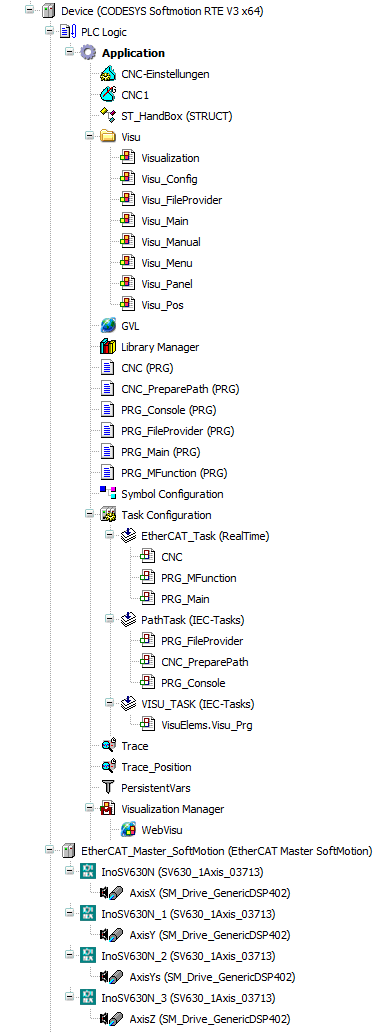
该项目使用四个伺服轴搭建龙门结构的CNC,使用Visu进行加载文件、手动和执行程序的操作,并在本地通过浏览器显示。代码主体结构参考官方示例 C:\Program Files\CODESYS 3.5.17.30\CODESYS\Projects\SoftMotion\4.10.0.0\Examples\Tutorial\。
6.5 多总线网关
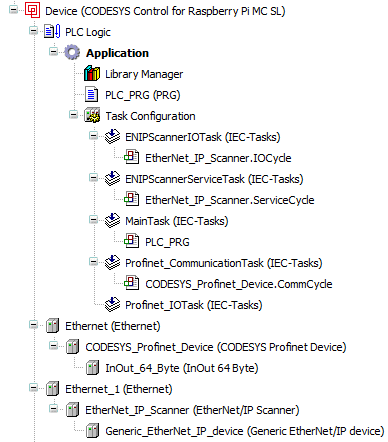
该项目将PLC作为ProfiNet从站,由S7-1200连接过来。同时作为EtherNET/IP主站,将数据桥接。
6.6 常见问题答疑
冗余:CODESYS支持冗余,但在冗余框架内的两台设备都需要独立的冗余授权。且EtherCAT冗余需要额外的EtherCAT专用交换机,不支持ProfiNET冗余。理论上来说EtherCAT冗余也无法做到dc不中断,可能会造成轴抖动等问题。
矩阵:矩阵功能需要单独收费。可以考虑用python、c++应用计算矩阵,再通过shm或tcp与codesys通讯。
符号通讯:符号通讯类似tia的s7协议,但相对封闭,仅对部分厂商开放。
OPC UA:标准授权内包含opc ua服务器,可以访问数据。但opc ua底层不开放,商用需授权,限制了其适用范围。
代码自动格式化:付费,由STweep Formatter for CODESYS提供。(很难想象2023年了代码格式化还需要第三方插件实现)